



Description
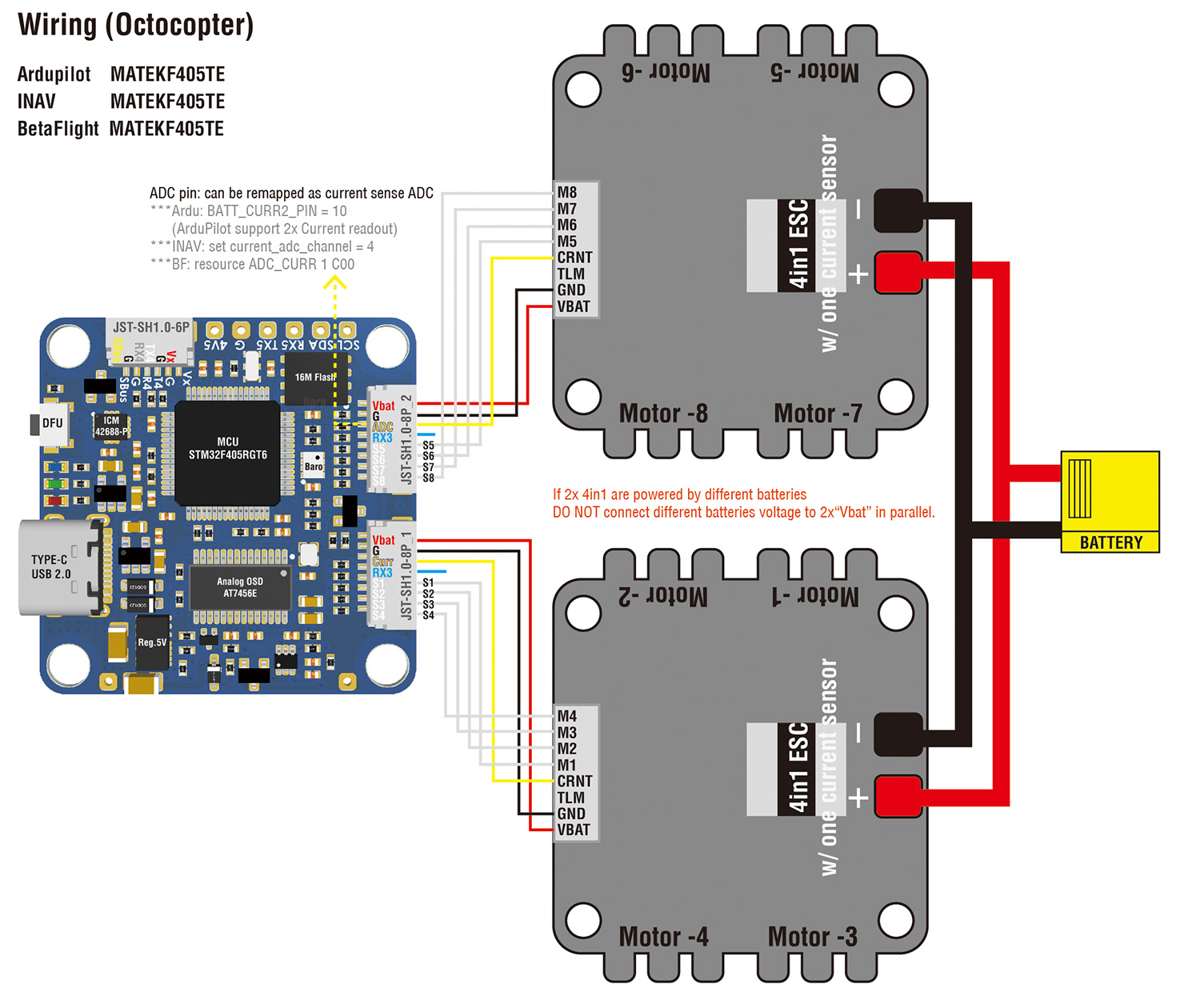
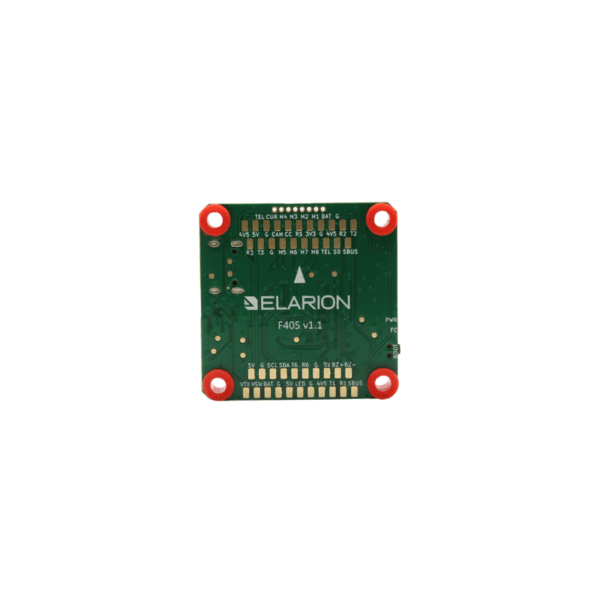
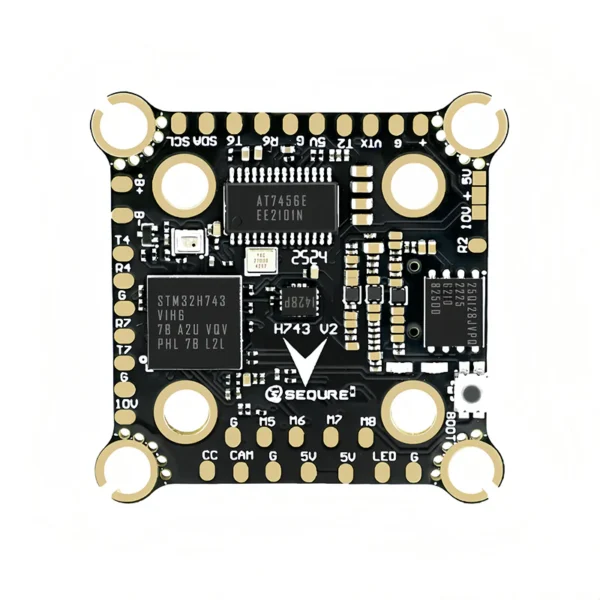
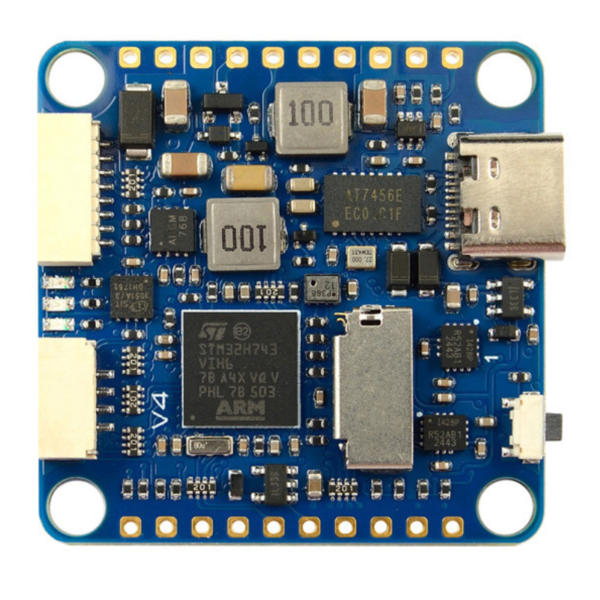
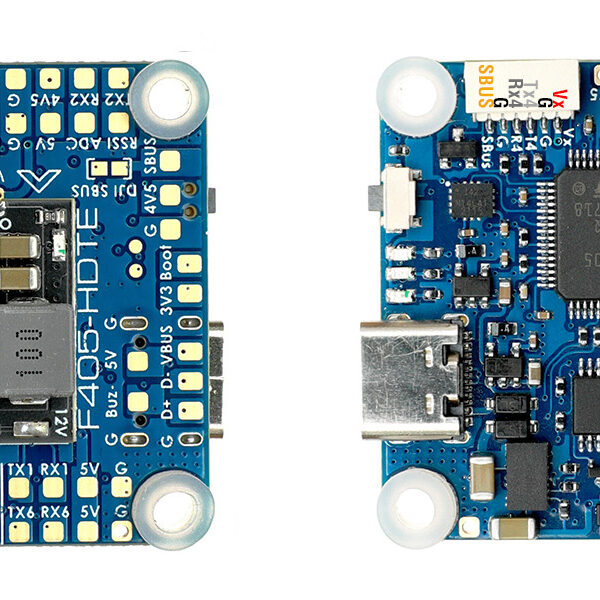
MATEKSYS F405-HDTE
F405-HDTE Quick Start Guide (PDF)
Features
- STM32F405 has 1MB flash which can run ArduPilot/INAV/BetaFlight
- InvenSense the 3rd generation IMU ICM42688-P
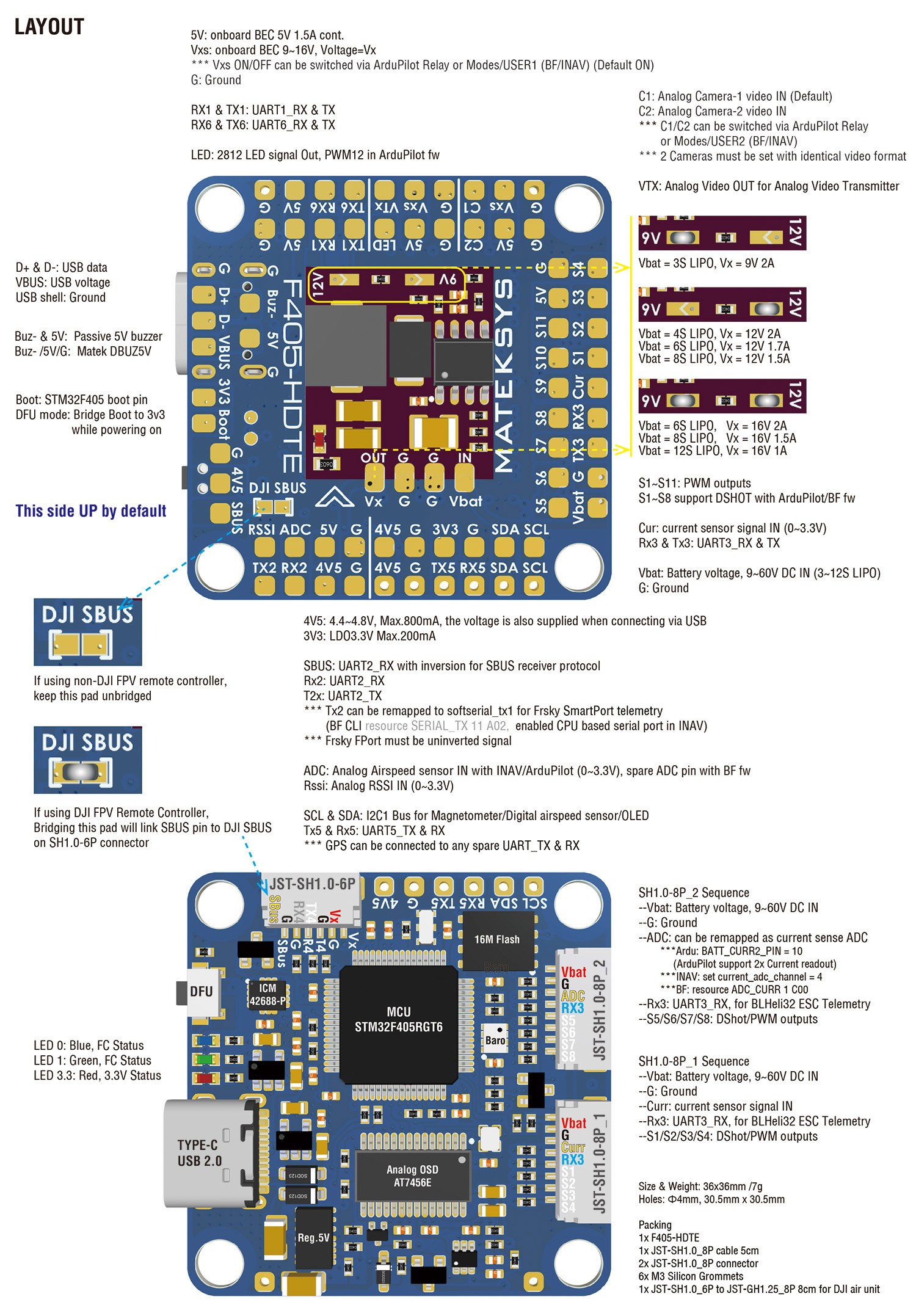
- 9-60V(3~12S LiPo) wide input voltage and voltage sense. and a 9~16V BEC for DJI OSD or analog VTX.
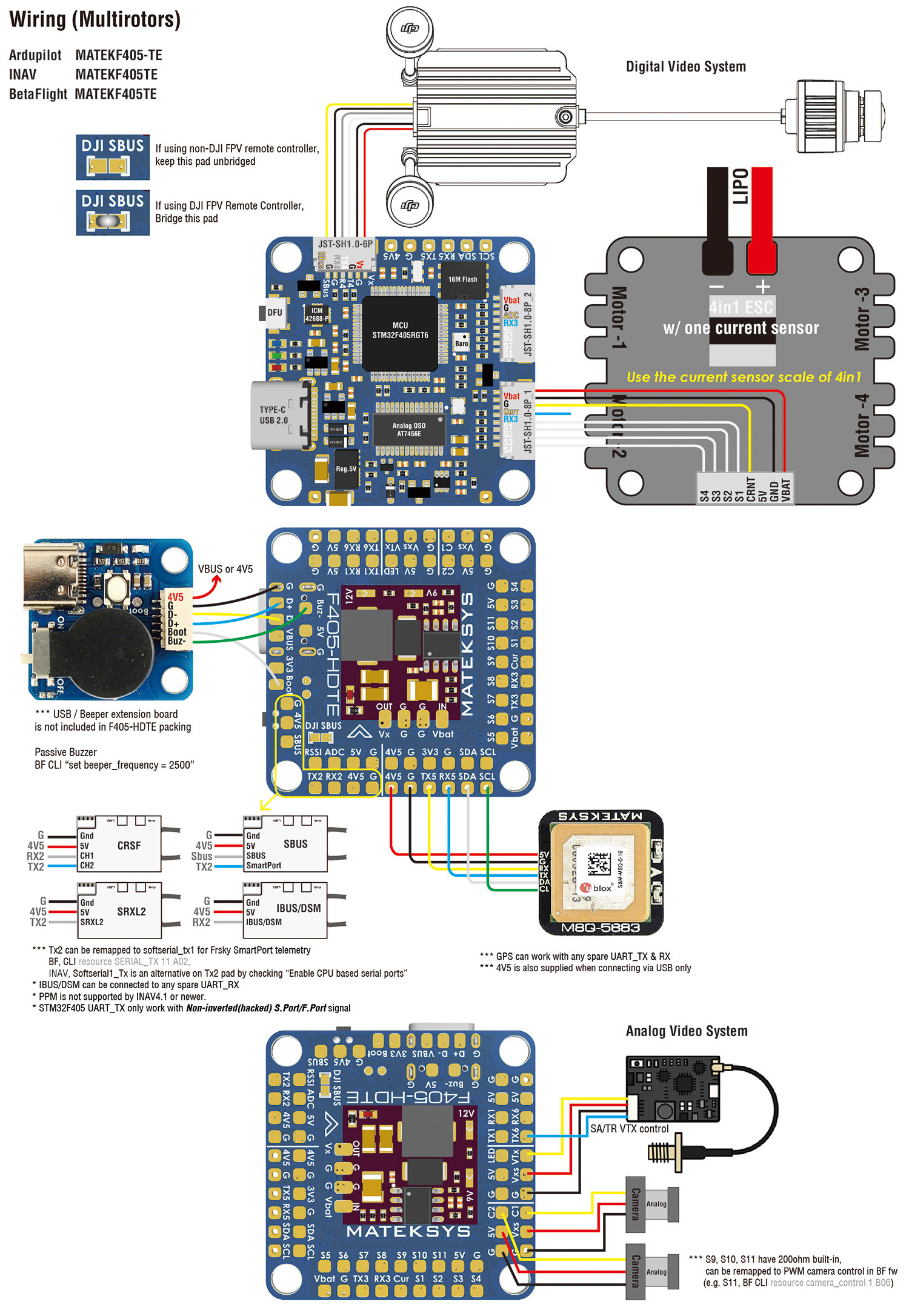
- 8motors+3servos in INAV/BF multirotor mixer.
- 2x SH1.0_8pin connector for PnP with 2x 4in1 ESC
- 1x SH1.0_6pin connector for PnP with HD System(Caddx Vista & Air Unit)
- USB pin breakout for connecting to external USB adapter.
Specifications
- MCU: STM32F405RGT6
- IMU: ICM42688-P
- OSD: AT7456E, DJI OSD
- Baro: SPL06-001 (I2C)
- Blackbox: 16M-byte Flash memory
- 6x UARTs, 1x Softserial_Tx option
- 12x PWM outputs (8x Dshot)
- 1x I2C
- 4x ADC (VBAT, Current, RSSI, Airspeed)
- 2x PINIO
- 2x SH1.0_8pin connector for 4in1 ESC
- 1x SH1.0_6pin connector for HD System(Caddx Vista & Air Unit)
- 3x LEDs for FC STATUS (Blue, Green) and 3.3V indicator(Red)
- 9~16V(Vxs) output ON/OFF switchable
- Dual analog camera signal switchable
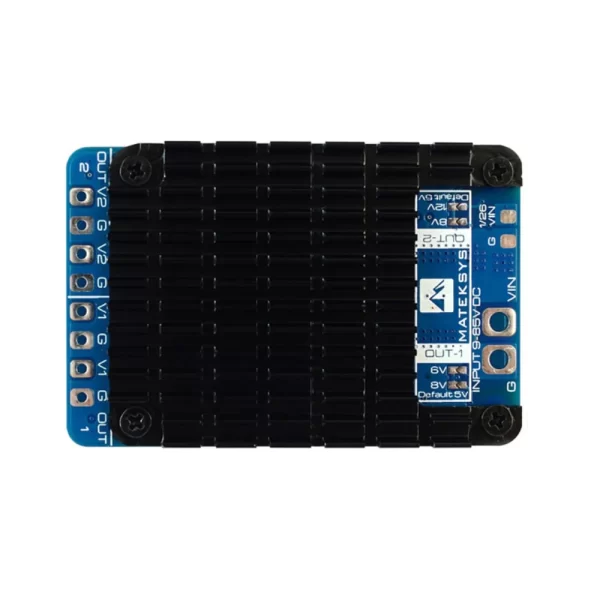
Power
- Input: 9~60V (3~12S LiPo)
- BEC: 5V 1.5A
- BEC: Vx, 9~16V/1~2A (3S IN/9V 2A, 4S IN/12V 2A, 6S IN/16V 2A, 8S IN/16V 1.5A, 12S IN/16V 1A)
- Battery Voltage Sensor: 1K:20K (INAV scale 2100, BF scale 210)
- No Current Sensor built-in, supports external current sensor of PDB/4in1
Firmware
- ArduPilot: MatekF405-TE
- INAV: MATEKF405TE
- BetaFlight: MATEKF405TE
Physical
- Mounting: 30.5 x 30.5mm, Φ4mm with Grommets Φ3mm
- Dimensions: 36 x 36 x 5 mm
- Weight: 7g
Including
- 1x FC F405-HDTE
- 6x Silicon grommets M4 to M3
- 1x SH1.0_8pin cable 5cm, 2x SH1.0_8pin connectors
- 1x SH1.0_6pin to GH1.25_8pin cable 8cm for HD System(Caddx Vista & Air Unit)
TIPS
With INAV firmware, DSHOT can not work on S3, S5,S7 because of DMA clash, pls use ONESHOT or MULTISHOT and calibrate ESC PWM range.
- F405-HDTE has INAV fw preloaded for QC
ArduPilot
- Support musical tone alarm with 5V passive buzzer
- Download latest ArduPilot firmware from HERE.
INAV
- With INAV firmware, DSHOT can not work on S3, S5,S7 because of DMA clash, pls use ONESHOT or MULTISHOT and calibrate ESC PWM range.
- Support 5V passive buzzer
- Download INAV firmware 4.1.x from our website.
BetaFlight
- If using 5V passive buzzer, CLI “set beeper_frequency = 2500”
- MATEKF405TE target was supported since BF4.3 RC3.
- set dshot_bitbang = ON when using X6 and X8 DSHOT,
- You may download BF 4.3 directly from BF configurator, BF 4.2.x from our website (click “Firmwares” button at upper right corner)
- Barometer SPL06-001 is not supported by Betaflight.
| INAV/BF MultiRotor | INAV Plane | ||||
| PWM | S1 | 5 V tolerant I/O | TIM8_CH4 | Motor | Motor |
| S2 | 5 V tolerant I/O | TIM8_CH3 | Motor | Motor | |
| S3 | 5 V tolerant I/O | TIM1_CH3N | Motor | Servo | |
| S4 | 5 V tolerant I/O | TIM1_CH1 | Motor | Servo | |
| S5 | 5 V tolerant I/O | TIM2_CH4 | Motor | Servo | |
| S6 | 5 V tolerant I/O | TIM2_CH3 | Motor | Servo | |
| S7 | 5 V tolerant I/O | TIM2_CH2 | Motor | Servo | |
| S8 | 5 V tolerant I/O | TIM2_CH1 | Motor | Servo | |
| S9 | 5 V tolerant I/O | TIM12_CH1 | Servo | Servo | |
| S10 | 5 V tolerant I/O | TIM13_CH1 | Servo | Servo | |
| S11 | 5 V tolerant I/O | TIM4_CH1 | Servo | Servo | |
| LED | 5 V tolerant I/O | TIM3_CH4 | 2812LED | 2812LED | |
| ADC | Vbat Pad | 1K:20K divider builtin 0~60V |
Vbat ADC ADC_CHANNEL_1, PC4 |
BF scale 210, INAV scale 2100 | |
| Curr pad | 0~3.3V | Current ADC ADC_CHANNEL_2, PC5 |
depends on external current sensor range | ||
| RSSI Pad | 0~3.3V | RSSI ADC ADC_CHANNEL_3, PB0 |
Analog RSSI, Spare ADC | ||
| ADC Pad | no divider builtin 0~3.3V |
AirS ADC ADC_CHANNEL_4, PC0 |
Analog Airspeed(INAV)Spare ADC(BF) | ||
| I2C | I2C1 | 5V tolerant I/O | Compass | QMC5883 / HMC5883 /IST8310 / IST8308 / MAG3110 / LIS3MDL | |
| OLED | 0.96″ | ||||
| onboard Barometer | SPL06-001 | ||||
| Digital Airspeed sensor | MS4525 (INAV) | ||||
| Temperature sensor | |||||
| UART 5V tolerant I/O |
USB | USB | |||
| TX1 RX1 | 5V tolerant I/O | UART1 | USER | ||
| TX3 RX3 | UART3 | USER, ESC Telemetry | |||
| TX4 RX4 | UART4 | DJI OSD | |||
| TX5 RX5 | UART5 | GPS | |||
| TX6 RX6 | UART6 | USER | |||
| TX2 RX2 SBUS |
5V tolerant I/O | UART2 | RC input/Receiver | ||
| SBUS pad | for SBUS receiver, SBUS pad = RX2+inverter | ||||
| RX2 pad | IBUS/DSM/PPM, INAV doesn’t support PPM | ||||
| TX2 & RX2 | CRSF | ||||
| TX2 pad | SmartPort Telemetry | INAV enable Softserial_Tx1BF “resource SERIAL_TX 11 A02” | |||
| TX2 pad | FPORT, uninverted S.Port/F.Port signal (hacked) | ||||
| TX2 pad | SRXL2
|
||||






Reviews
There are no reviews yet.